Système de régulation anti-cliquetis
Le système de régulation anti-cliquetis se compose de trois parties:
1. Capteur de cliquetis (saisie du signal)
2. Module de cliquetis (traitement du signal)
3. Appareil de commande (exploitation du signal)
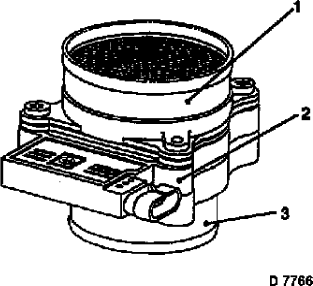
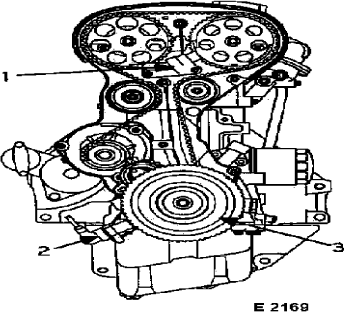
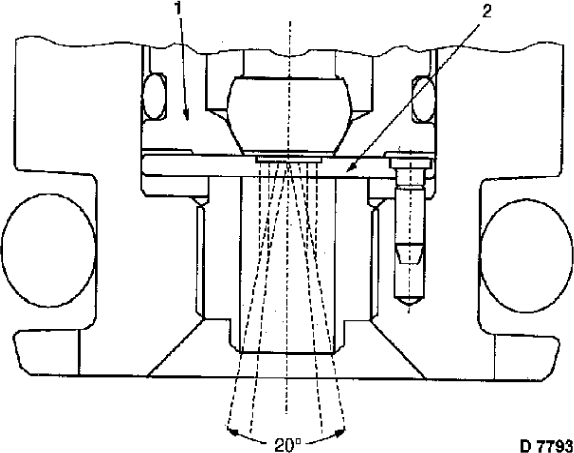
Capteur de cliquetis
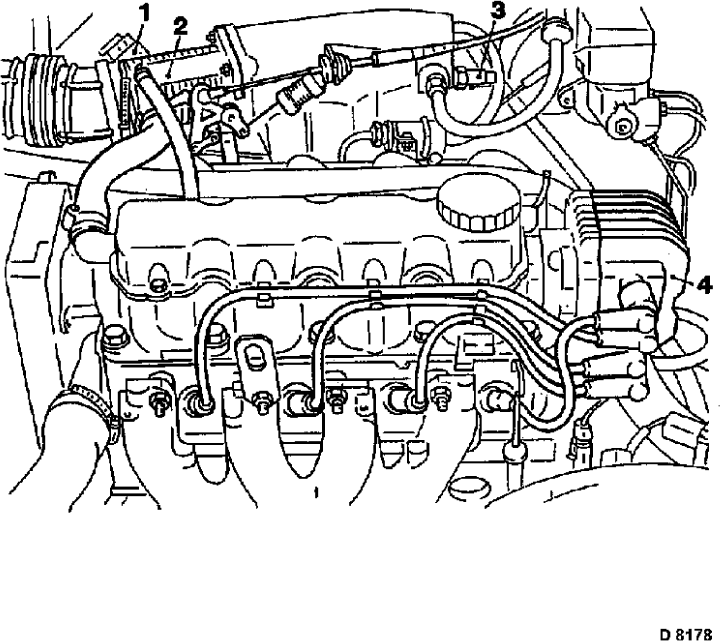
Le capteur se trouve au bloc-moteur en dessous du tube d'admission, entre les cylindres 2 et 3. La fréquence de résonnance du capteur piézo-électrique est de l'ordre de 8 kHz qui correspond à la fréquence de cliquetis du moteur. Les oscillations mécaniques au bloc-moteur sont continuellement transformées en un signal électrique (tension alternative). Le capteur signale au module de cliquetis toute manifestation de cliquetis par un niveau de tension de sortie très nettement surélevé.
Dans un but de diagnostic, une tension continue d'environ 2,5 Volts est appliquée par l'appareil de commande au capteur de cliquetis. Si le niveau de
tension continue se trouve modifié par un court-circuit ou par une interruption de câble,la commutation sur le champ caractéristique de 91 RIO se produit et il est procédé à un retard de sécurité de 5° angle de vilebr. Ces mesures sont destinées à prévenir une détérioration éventuelle du moteur.
| Moteur | Numéro de pièce | Fréquence de cliquetis |
| C 16 XE | 10 456 144 | 8000 Hz |
Module de cliquetis
Le module a pour mission de surveiller en permanence le signal de cliquetis et, dans le cas de l'apparition d'un phénomène de cliquetis, de produire une impulsion rectangulaire qui pourra être exploitée par le logiciel de l'appareil de commande.
Le module de cliquetis (module SNEF) a été pour la première fois intégré à l'appareil de commande.
Lorsqu'un phénomène de cliquetis se produit, la sortie du module de cliquetis tombe de 9 V à 0 V. La durée de l'impulsion produite par le module est proportionnelle à l'intensité du cliquetis.
Si le signal de sortie du module reste plus de 4 sec. à 0 V (Low), l'appareil de commande présume être en présence d'un dysfonctionnement et commute sur le champ caractéristique de 91 RIO et, de plus, il est procédé à un retard de sécurité de l'angle d'allumage de 5° d'angle de vilebrequin.
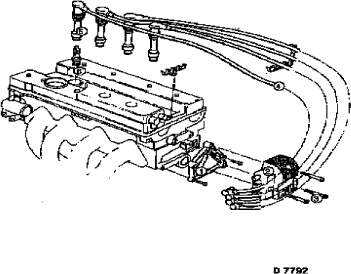
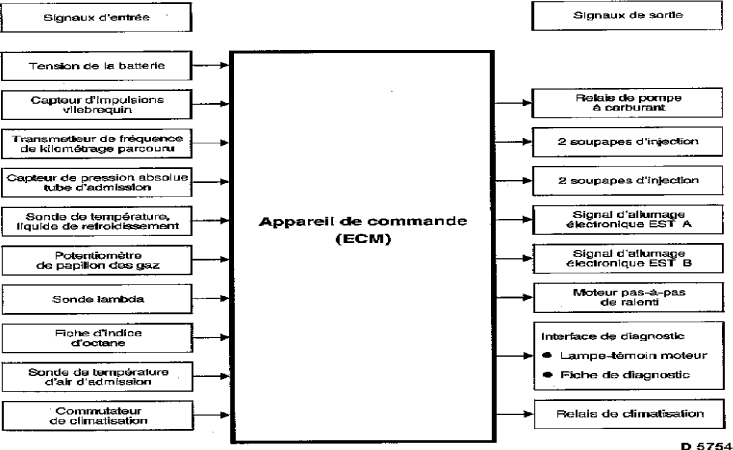
Appareil de commande
La mission de l'appareil de commande consiste à modifier le réglage de l'angle d'allumage en direction retard dès qu'un phénomène de cliquetis est détecté afin d'éviter que le phénomène de cliquetis ne poursuive.
L'impulsion fournie par le module de cliquetis est filtrée par le logiciel d'appareil de commande avant qu'un phénomène de cliquetis ne soit décelé.
Le filtrage du signal est réalisé d'une part par une fenêtre d'impulsion qui n'est ouverte que pendant la durée pendant laquelle un cliquetis d'allumage est susceptible de se produire (les impulsions qui se manifestent en dehors de cette durée ne sont pas traitées). D'autre part par un filtre d'impulsions. Toutes les impulsions dont la largeur est inférieure à une valeur minimale dépendant de la vitesse de rotation et de la charge du moteur sont éliminées. Ces deux mesures de filtrage ont pour objet d'augmenter la sûreté de détection du cliquetis.
Lorsqu'une impulsion a passé ces tests, l'appareil de commande procède à une attribution de cylindre. Cela veut dire que l'impulsion de cliquetis est attribuée au cylindre qui a allumé en dernier. On utilise un compteur de cylindre (logiciel) pour ce genre d'attribution.
Au prochain temps de travail de ce cylindre, l'angle d'allumage qui lui est attribué est déréglé en direction de retard. La mesure du déréglage est programmable en fonction de la vitesse de rotation. Les angles d'allumage des autres cylindres restent non concernés par cette correction.
C'est pourquoi on parle aussi d'une régulation anti-cliquetis sélective.
Le déréglage de l'angle d'allumage en direction retard se répète à chaque explosion reconnue comme produite par auto-allumage. Si aucun cliquetis n'apparaît plus, l'allumage est ramené progressivement, dans des temps dépendant de la vitesse de rotation, en pas de 0,3° angle vilebrequin en direction "avance". Ce rattrapage se poursuit jusqu'à obtention du réglage d'avance normal ou jusqu'à enregistrement d'un nouveau phénomène de cliquetis. Cette opération est appelée correction rapide ou moteur synchrone de l'angle d'allumage.
Une adaptation sélective suivant cylindre des valeurs de modification de réglage en direction retard se produit dans une boucle de temps d'une demi-seconde de durée (à condition qu'une limite calibrée de vitesse de rotation soit dépassée). Si à cet instant la correction rapide en direction retard est supérieure à une valeur limite, une partie de cette correction est prise comme valeur d'adaptation. Les valeurs d'adaptation sont emmagasinées dans 15 cellules d'apprentissage (par cylindre) en fonction de la vitesse de rotation et de la charge du moteur. Ce processus avec des adaptations lentes et rapides est comparable au principe de fonctionnement de l'intégrateur et de la mémoire d'apprentissage par blocs.
Si la modification de réglage rapide tombe en dessous de la valeur seuil, l'adaptation ne se poursuit pas. La valeur adaptée diminue ensuite de 0,3 °angle vilebrequin en espaces de temps programmables d'au moins 0,5 sec. Une adaptation ou régulation de rattrapage n'a lieu que dans la cellule d'apprentissage affectée à cet état de service du moteur.
Le programme renferme par ailleurs trois champs de lignes caractéristiques pour 91, 95et 98 RIO.
Partant du champ de lignes caractéristiques pour 98 RIO, une commutation au champ d'indice d'octane immédiatement inférieur peut avoir lieu si les retraits adaptatifs d'allumage de la régulation anti-cliquetis sont suffisamment grands. Lorsque le champ de lignes caractéristiques inférieur est sélectionné, les valeurs d'adaptation de jusqu'alors sont remises à zéro par la même occasion.